LEGO EV3 Mindstorms
Pour les commandes du Robot :
Download the EV3 Classroom App v. 1.5.3 : https://www.microsoft.com/fr-fr/p/ev3-classroom-lego-education/9p8sjvzm63sz?rtc=1&activetab=pivot:overviewtab


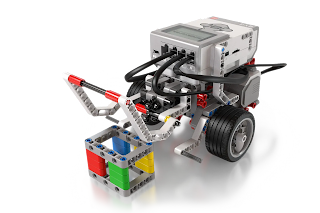
Nous utiliserons la base motrice comme une plate-forme modulaire, afin de découvrir les base de la construction et de la programmation de robots autonomes. Chaque leçon introduit une nouvelle extension à construire sur la base motrice. Ces extensions lui permettent de détecter des obstacles, de déplacer des objets, de suivre des lignes et de tourner selon des angles précis.
En route pour Mars
Astuces de construction :
https://education.lego.com/fr-fr/lessons/ev3-space-challenge/1-get-ready-to-go-to-mars#astuces-de-construction

Avant de débuter avec EV3 Classroom
Téléchargement et installation
Voici le lien pour télécharger et installer l'application EV3 Classroom sur la plateforme de votre choix. Une fois sur la page vous n'avez qu'à choisir la plateforme désirée et de suivre les instructions.
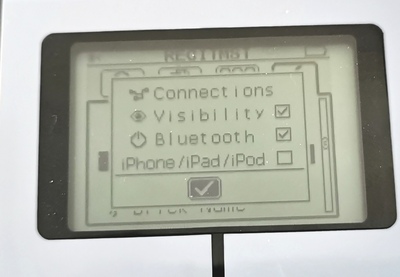
Connexion bluetooth EV3 Classroom
- Pour le iPad, cocher la case iPhone/iPad/iPod sur la brique EV3 (menu configuration). Faites la connexion via les préférences de votre iPad.
- Pour les portables Windows et Chromebook, NE PAS COCHER la case iPhone/iPad/iPod. Faites la connexion directement dans l'application (pas dans les préférences de votre système).
Un bref survol de l'application
Voici une brève présentation de l'application et la réalisation d'un premier programme
Mise à jour du micrologiciel (Firmware) avec EV3 Classroom
Pour utiliser votre EV3 avec EV3 Classroom, il est important de mettre à jour le micrologiciel de votre brique. Cette mise à jour peut se faire uniquement à partir d'un PC et une installation du « EV3 device manager » est nécessaire. Il faut absolument que votre EV3 soit connecté avec le câble USB.
Défi 1 : Le carré
Vous êtes maintenant prêt pour programmer votre robot pour qu’il exécute un carré d’un mètre de côté (il est très difficile de réaliser un carré parfait, en robotique il faut vivre avec le frottement, la précision des déplacements, donc accepter un % d’erreur sur vos projets. Sinon attendez-vous à passer plusieurs minutes à ajuster votre robot/programme).
En utilisant des éléments comme le diamètre des roues, le nombre de rotations ou d'autres éléments que vous jugez pertinent, minimiser le nombre d’essais pour réaliser votre carré. Bien qu’il soit possible de ne faire que des essais et erreurs pour trouver la bonne programmation, il est plus payant «mathématiquement» parlant de faire minimalement calculer les élèves.
Faites vos propres essaies et si vous n'y arrivez pas, voici un tutoriel qui vous explique les bases de ce défi.
Défi 2 : La balayeuse
Comme second défi, vous devrez utiliser votre capteur ultrasons pour changer de direction si votre robot se trouve trop près d'un mur.
Vous
devrez faire avancer votre robot. Lorsqu'il arrive à 15 cm d'un
obstacle (mur) il devra s'arrêter, reculer en changeant de direction et
on continuer à avance jusqu'aux obstacles suivants.
Faites vos propres essaies et si vous n'y arrivez pas, voici un tutoriel qui vous explique les bases de ce défi.
Un peu plus loin 1 - Mesurer et afficher une distance en utilisant le capteur ultrasons
Cette page et les pages qui suivent, vous permettrons d'apprendre à utiliser plus efficacement votre robot en allant chercher le potentiel de divers capteurs et en introduisant des notions de programmation un peu plus avancées. Bonne découverte!
Tâche à réaliser
Votre EV3 peut également servir à mesurer des distance à l'aide du capteur à ultrasons. Il est précis entre 3 cm et 200 cm mais, il peut prendre des mesures jusqu'à environ 400 cm. Voici donc comment faire afficher directement sur l'écran de votre EV3 les mesures de distance et le transformer en appareil de mesure de longueurs.
Un peu plus loin 2 - Avancer si un objet se trouve entre deux distances
Tâche à réaliser
Nous voulons que votre robot avance si un objet se trouve entre 10 cm et 20 cm devant votre robot. S'il est plus près ou plus loin, on veut que celui-ci s'arrête.
Un peu plus loin 3 - Réagir à la proximité d'un objet
Tâche à réaliser
Nous voulons que le robot réagisse en fonction de la proximité d'un objet. Si l'objet se trouve entre 3 cm et 10 cm du robot, nous voulons qu'il recule. Si l'objet se trouve entre 10.1 cm et 20 cm, nous voulons que le robot avance. Sinon, nous voulons qu'il demeure immobile.
Un peu plus loin 4 - Avancer à des vitesses aléatoires
Tâche à réaliser
Ici nous voulons que notre robot se déplace à une certaine vitesse (choisie de façon aléatoire) pendant 2 secondes. Par la suite, nous voulons que la vitesse change encore un fois de façon aléatoire et ce toutes les deux secondes.Un peu plus loin 5 - Accélération et décélération
Tâche à réaliser
Nous
voulons ici faire accélérer notre robot, qui est au début immobile,
jusqu'à une vitesse de 70% et une fois à cette vitesse, nous voulons le
faire décéléré jusqu'à ce qu'il redevienne immobile.
Un peu plus loin 6 - Mesurer la vitesse moyenne d'un déplacement
Tâche à réaliser
La vitesse moyenne correspond au rapport entre la distance totale parcourue et le temps nécessaire pour franchir cette distance. Nous voulons ici utiliser la circonférence des roues, le nombre de rotations et le temps pour déterminer la vitesse moyenne de notre robot lors du déplacement de 3 secondes. Par la suite nous voulons faire afficher la vitesse moyenne ainsi que l'unité de mesure sur l'écran de votre robot. Comme défi supplémentaire, nous pourrions introduire des valeurs choisies au hasard pour qu'à chaque fois le robot ne se déplace pas à la même vitesse moyenne.Un peu plus loin 7 - Déterminer la valeur numérique d'une couleur à l'aide du capteur de couleur
Tâche à réaliser
Pour éviter les essaies et erreurs lors de la programmation il est possible de faire afficher sur l'écran de votre robot la valeur numérique (chiffre de 1 à 7) de la couleur qui se trouve sur le capteur. Ceci peut être très utile lors de la préparation d'une compétition.
Un peu plus loin 8 - Faire une action en fonction de la couleur
Tâche à réaliser
Imaginons que nous voulons faire le tri d'objets en fonction de la couleur. Si l'objet est jaune, nous voulons que l'objet soit dirigée vers la gauche et si l'objet est blanc, nous voulons que l'objet soit dirigée vers la droite. Si c'est d'une autre couleur, nous voulons que rien ne se passe.
Un peu plus loin 9 - Avancer en ligne droite en utilisant le gyroscope
Tâche à réaliser
Ceci fait appel à une programmation plus avancée. Nous voulons utiliser le gyroscope pour que le robot garde une trajectoire (en degré) même si nous poussons sur le robot ou encore que le sol n'est pas très lisse. C'est un bon défi mais très impressionnant comme résultat.
Un peu plus loin 10 - Utiliser le gyroscope pour faire un carré
Tâche à réaliser
Dans votre premier défi du carré, vous avez probablement réaliser que votre carré n'était pas parfait et que plus la batterie diminuait, moins le carré était beau. Ou encore lorsque vous changiez de surface votre carré ne fonctionnait plus. Pour obtenir une forme géométrique presque parfaite, il est essentiel d'utiliser le gyroscope. Voici donc comment s'y prendre pour avoir un beau carré.
Un peu plus loin 11 - Suiveur de ligne +++
Tâche à réaliser
Il est relativement simple de faire suivre une ligne noire par un robot. Cependant ce n'est pas toujours précis. Voici comment utiliser le capteur de couleur pour augmenter la précision de ce suiveur de ligne. Ce tutoriel est en anglais mais très bien fait. Il est également possible d'utiliser deux ou trois capteur pour avoir plus de précision. C'est un défi que vous pourriez relever par la suite.
Autres ressources EV3 Classroom
Voici d'autres ressources que vous pourriez utiliser pour votre apprentissage ou pour réaliser des activités avec les élèves
- Formation « Initiation à la programmation avec LEGO EV3 Classroom » de Érick Sauvé et Frédéric Fournier
- Padlet robotique du CSSBF, partage de Sébastien Bergeron CP RÉCIT CSSBF->
- Fiches d'activités pour les élèves pour l'apprentissage de EV3 Classroom. Partage de Sébastien Bergeron CP RÉCIT CSSBF
- Site de tutoriels (anglais) pour pousser plus loin votre apprentissage de EV3 Classroom. EV3 Lessons
Ajouter des capteurs
Vous n’avez pas encore un robot, car il n’a pas encore de capteurs, il ne peut donc pas interagir avec son environnement (une des conditions pour que ce soit un robot). Nous allons installer et programmer quelques capteurs pour réaliser ces tâches.
Présentation des capteurs de l’ensemble NXT :
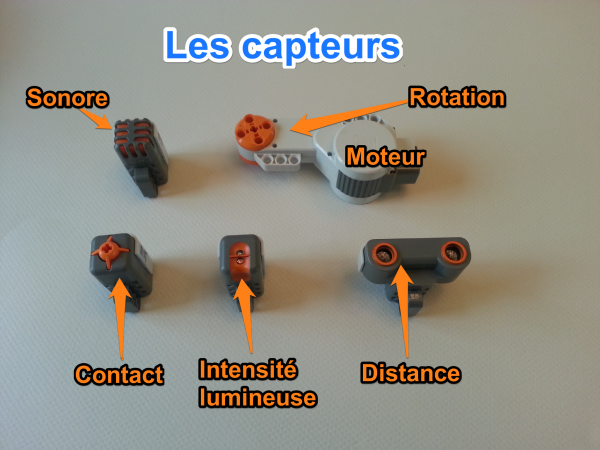
Les capteurs pour l’ensemble EV3

Pour EV3, on navigue à l’aide des boutons sur la brique vers le menu 1 puis 2 de l’image ci-dessous :
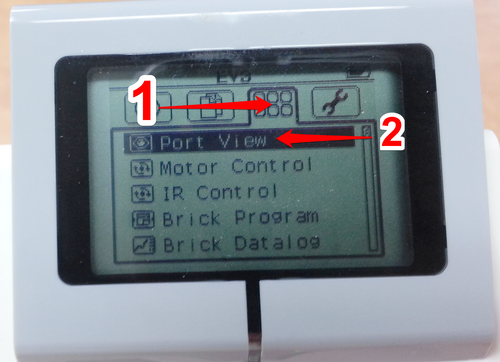
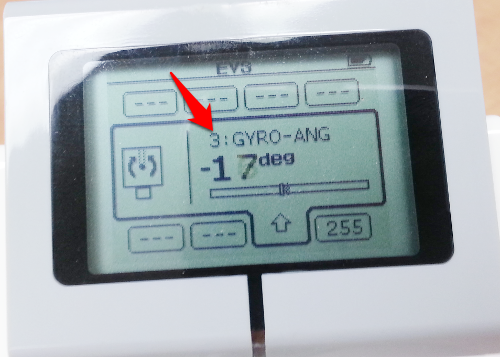
Ensuite on peut choisir le port désiré pour voir les mesures (exemple du capteur gyroscope dans le port 3 ci-dessous) :
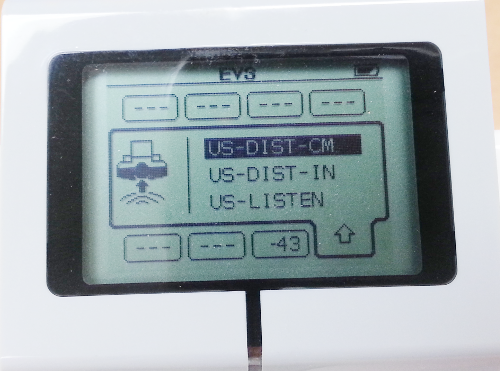
On
peut cliquer sur le bouton de commande central pour pouvoir
sélectionner d’autres options (exemple du port 4 avec le capteur
ultrason où on peut sélectionner les cm ou autres) :
Vous pouvez essayer de faire démarrer votre robot lors d’un son intense, ou de l’arrêter à différents moments : lorsqu’il rencontre une ligne sur le sol, à une distance (capteur de distance, attention aux fils devant le radar, ils peuvent interférer) de 30 cm d’un obstacle, lorsque le robot touche un obstacle.
Faire tourner son robot
Votre robot peut maintenant se déplacer en ligne droite sur une certaine distance, mais dans plusieurs défis vous devrez le faire changer de direction. Il faut donc le programmer pour le faire tourner. Essayer les degrés suivants : 45°, 90°, 180°.
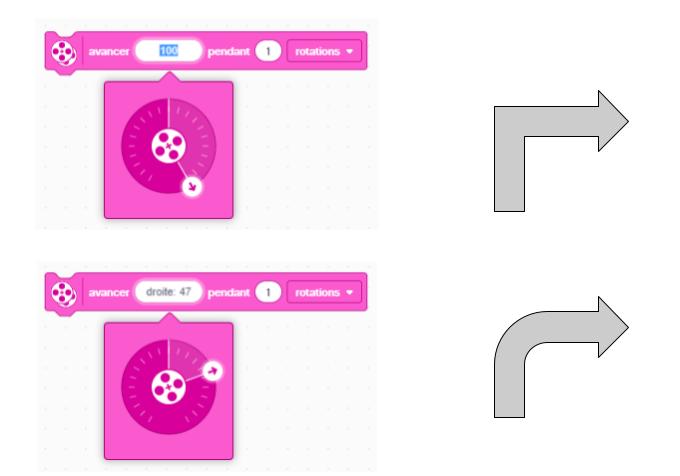
L’image ci-dessous explique comment contrôler les deux moteurs de votre robot pour changer de direction.
EV3 Classroom
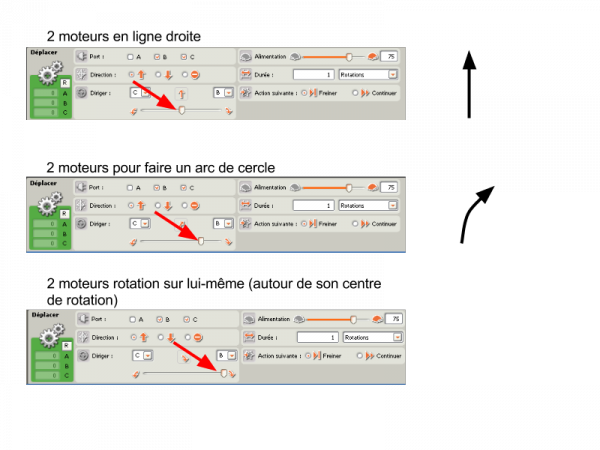
Pour NXT
Pour EV3 Mindstorm
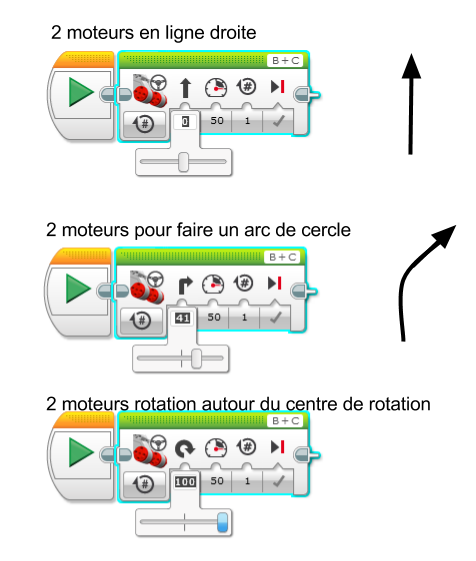
- Cas ligne droite : le curseur de «synchronisation» des moteurs est au centre, donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C fait lui aussi 1 rotation dans le même sens.
- Cas arc de cercle : le curseur de synchronisation n’est pas centré ni à l’extrémité, donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C ne fait qu’une partie de la rotation dans le même sens. Ce qui donne un arc de cercle de rayon plus ou moins grand.
- Cas rotation sur lui-même : le curseur de synchronisation est placé à une extrémité (gauche ou droite), donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C fait une rotation dans le sens contraire. Ce qui résulte en un changement de direction sur lui même (autour de son centre de rotation, entre les 2 roues).
EXERCICES : LEGO MINDSTORM
https://res.friportail.ch/robotic/system/files/2019-11/Exercices_EV3.pdf
https://docs.google.com/document/d/1Vgo5bVHc0qLq9WvWatP9r2yFujAMFKdQjNuOy84_4d0/edit
Commentaires
Enregistrer un commentaire